Le projet a été confié par Monsieur Jean Philippe DILLENSEGER à la demande de son confrère Monsieur Sébastien MATEO, maître de conférence de l’université de Lyon et masseur-kinésithérapeute de profession. Tous deux sont spécialisés dans la rééducation.
Il a été baptisé « Dispositif d’Aide à la Rééducation Linguale » (DARL). Actuellement, les diagnostics de rééducation sont dressés à partir de la mesure de la surface de la langue, cependant la méthode utilisée par le Docteur MATEO est longue et fastidieuse.
Ce dispositif devra entre autres permettre, pour chaque utilisation, la caractérisation de la langue sous deux aspects : premièrement une mesure instantanée de la surface linguale en contact avec le dispositif avec une précision se rapprochant du millimètre carré, et deuxièmement une quantification de la force de poussée de la langue.
Le dispositif envisagé doit être portable et pratique d’utilisation. À terme, nos réflexions pourraient être une aide aux recherches engagées dans la compréhension du fonctionnement lingual et dans les procédures de rééducation des patients souffrants de troubles temporo-mandibulaires.
Le projet en vidéo :
Approche envisagée :
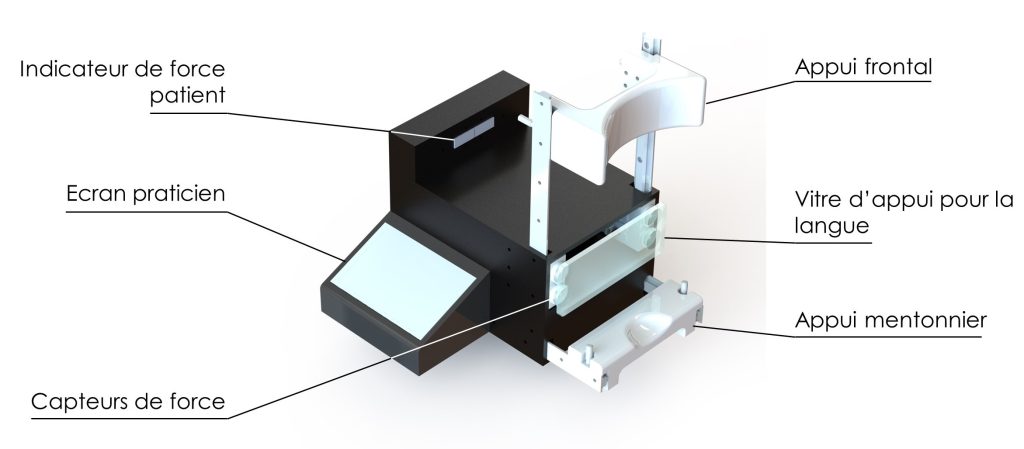
L’approche retenue a été de demander au patient d’appuyer avec sa langue sur une vitre transparente fixe. La force sera mesurée par des jauges de contraintes disposées à l’arrière de cette vitre, et un indicateur lumineux indiquera au patient l’intensité de cette force. La surface sera obtenue en prenant une photo de la vitre à l’aide d’une caméra, puis un algorithme détectera cette surface pour l’indiquer au praticien.
Enfin, des supports frontaux et mentonniers permettront au patient de positionner correctement sa tête face au dispositif, et un écran tactile permettra au praticien de piloter le dispositif et d’accéder aux résultats de la mesure.
Partie mécanique :
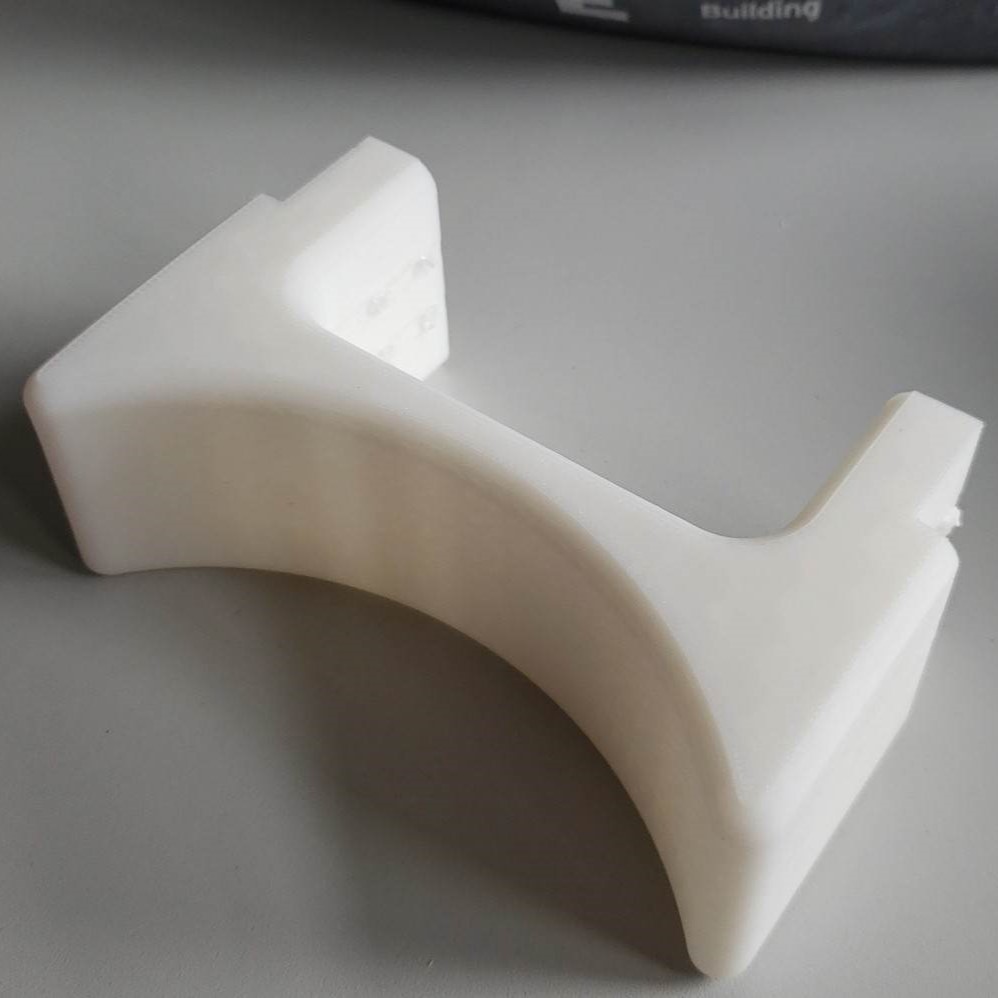
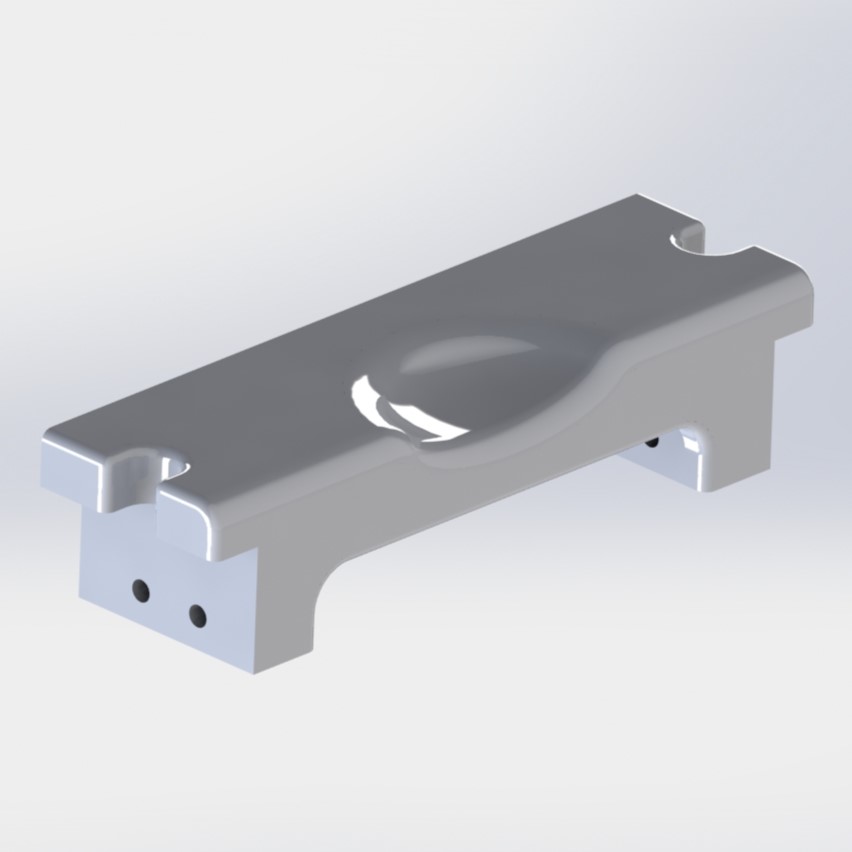
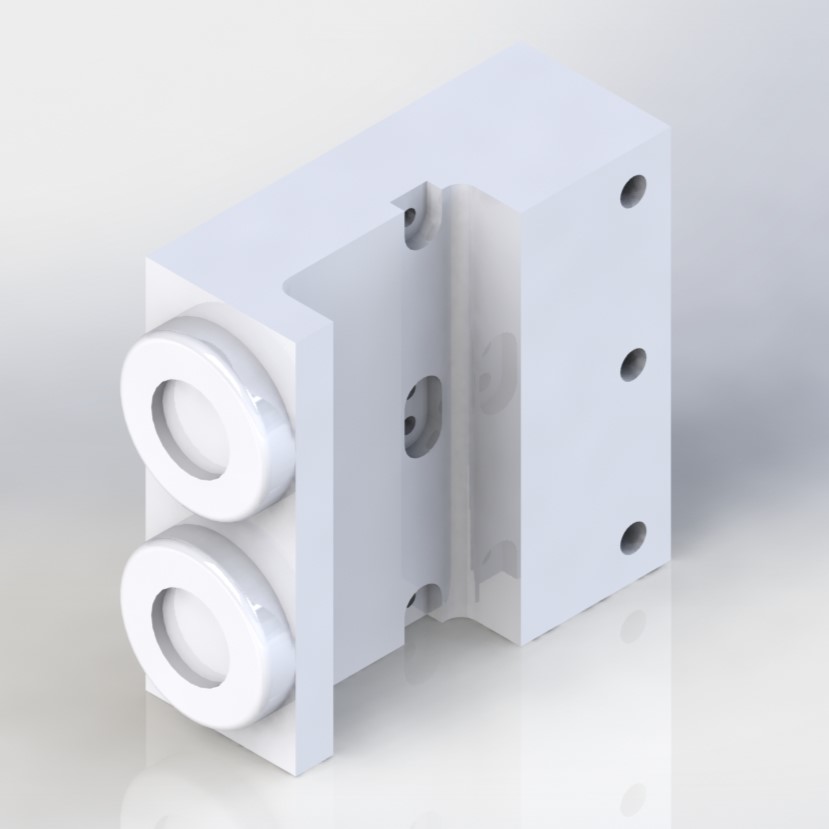
Les parties de petite taille et avec des formes complexes telles que les appuis frontaux et mentonniers ou les supports pour les capteurs de force ont été modélisées sur SolidWorks puis imprimées en 3D en HIPS blanc. Le support pour l’écran praticien a été imprimé en ASA noir mat.
Toutes les impressions on été réalisées sur la Zortrax M200+ du FabLab de l’école, en qualité standard pour obtenir un rendu lisse sans trop allonger le temps d’impression.
Modèle 3D interactif du support de l’écran
Impression 3D du support frontal
Modèle 3D du support mentonnier
Modèle 3D du support pour les capteurs de force
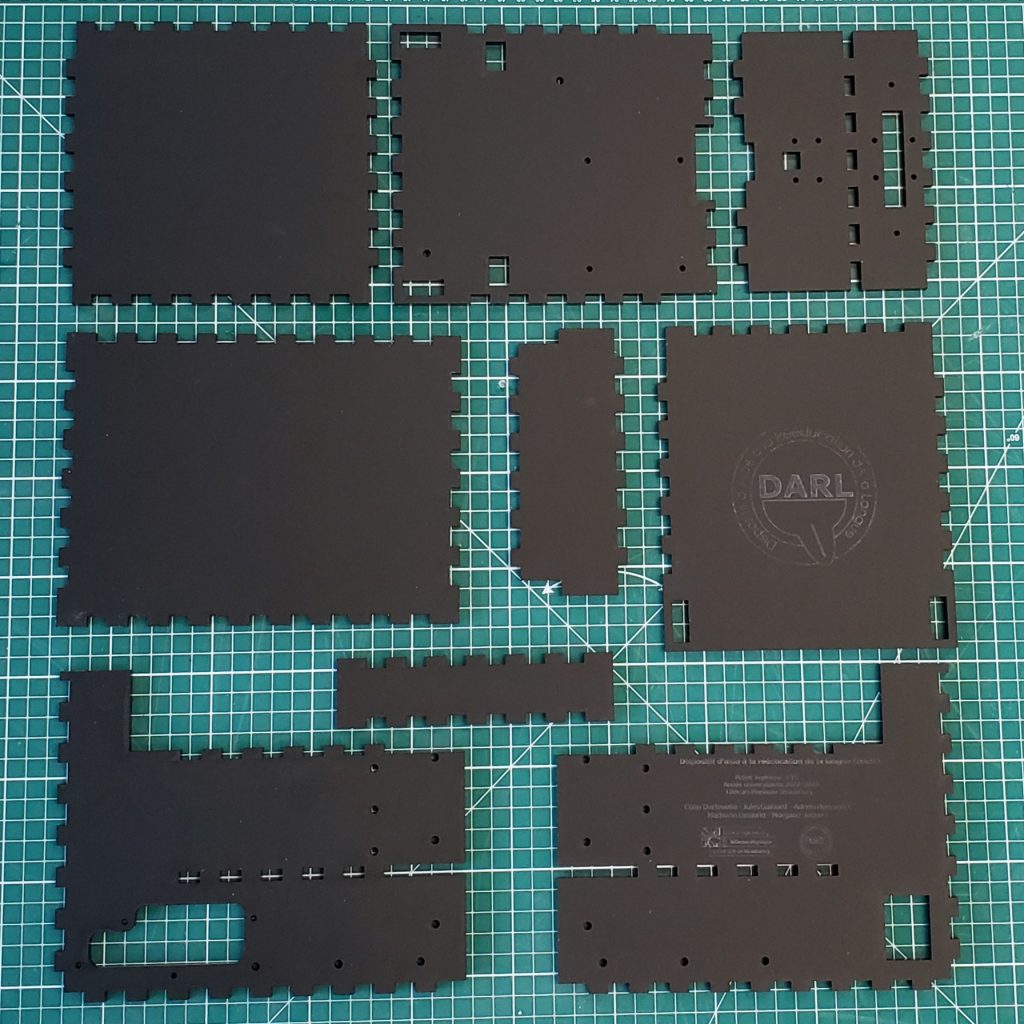
Le caisson principal a été découpé au laser sur du PMMA noir brillant et mat. Les plans ont été réalisés directement sur Solidworks en créant une pièce par face découpée au laser, qui ont été assemblées virtuellement pour placer correctement les encoches.
Nous avons pris, pour un brûlage de 0,075mm, des encoches mâles de 10,15mm et des encoches femelles de 9,85mm. Chaque pièce a ensuite été exportée en dessin 2D vectorisé (enregistrer sous depuis SolidWorks, en choisissant le format DXF).
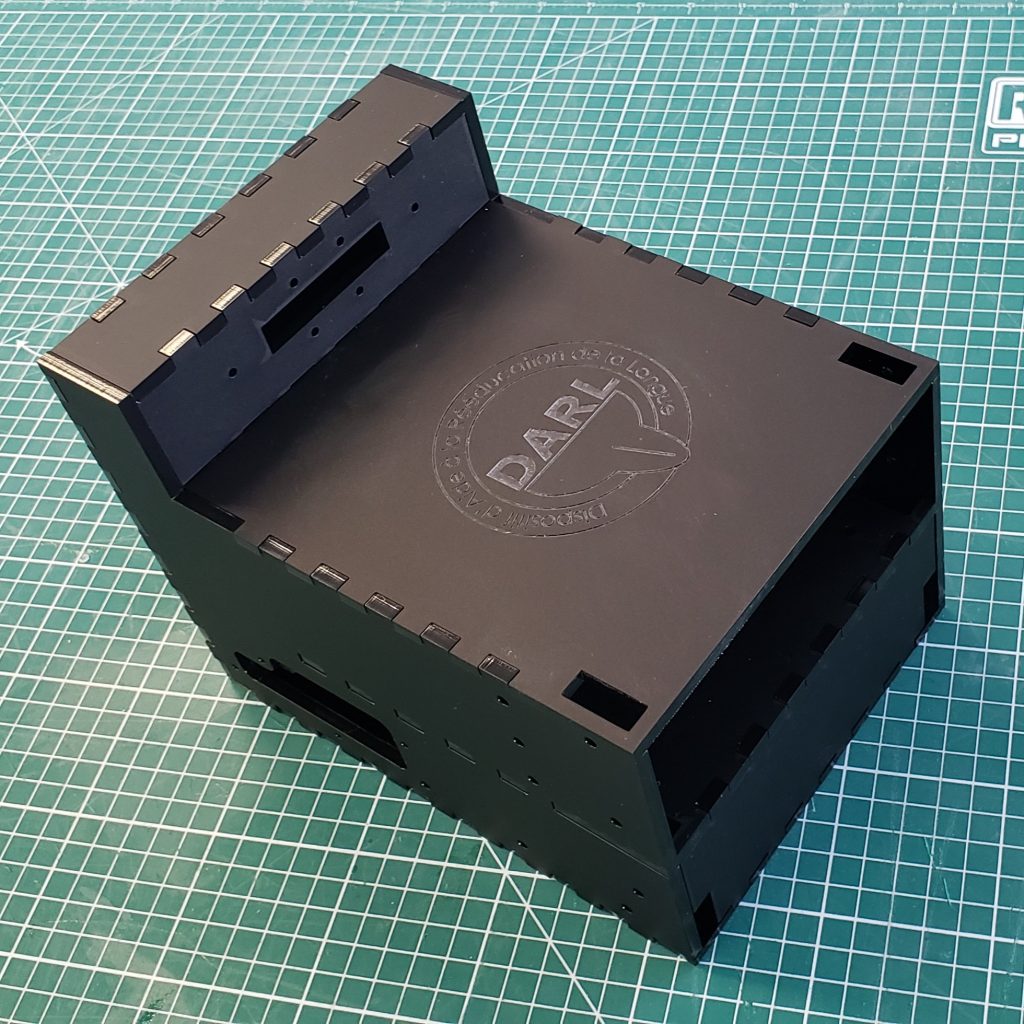
Une fois découpées, les pièces se sont assemblées sans problème, mais le trop grand jeu des encoches fait qu’il faudra coller les différentes parties entre elles.
Pour des raisons esthétiques, nous avons rempli le logo gravé sur le dessus du caisson avec de la gouache blanche, en essuyant l’excédant avec de l’essuie-tout et de l’acétone .
Pièces découpées au laser
Caisson découpé au laser
Caisson assemblé avec les composants imprimés en 3D et le logo peint
Affin de pouvoir s’adapter à la morphologie des patients, les appuis mentonniers et frontaux sont chacun montés sur deux rails en aluminium avec une vis permettant de bloquer leur position.
Le maintient de la vitre sur les capteurs de force, qui doit être amovible pour faciliter le nettoyage du dispositif, sera assuré par des aimants néodyme disposés aux quatre coins de celle-ci.
Partie électronique :
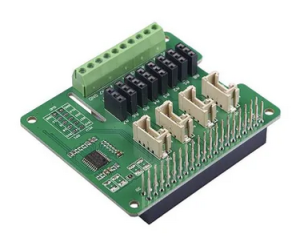
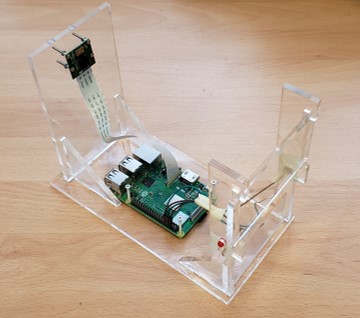
Toute la partie de traitement de l’information sera réalisée par un Raspberry Pi 3 B+ car il nous permet de facilement piloter un écran tactile ainsi qu’une caméra. Il est accompagné d’un shield Grove servant de convertisseur analogique-numérique afin de recueillir le signal des 4 capteurs de force Grove. L’indicateur de force pour le patient est composé de 2 jauges à LED Grove et un anneau de LED placé autour de la caméra permet de contrôler l’éclairage lors de la prise de vue. Enfin, une alimentation 5V de 35W placée à l’intérieur du boitier permet d’alimenter l’ensemble des composants sans passer par le Raspberry. Un interrupteur placé sur le côté du dispositif permet de le mettre sous tension et de l’éteindre.
Raspberry Pi avec module caméra
Shield Grove pour Raspberry
Jauge à LED Grove
Ecran tactile 5″ pour Raspberry Pi
Capteur de force Seeed Studio
Partie logicielle :
Mesure de la surface :
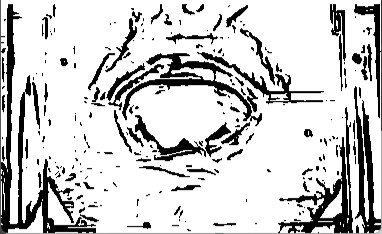
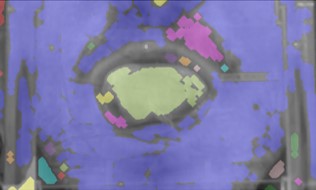
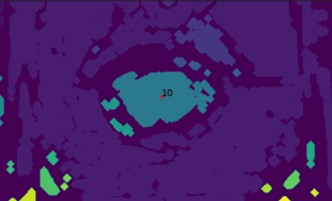
Le calcul de la surface à partir de la photo de la langue est assuré par un algorithme de détection de contours codé en Python. Cet algorithme commence par préparer l’image en la recadrant et en ajustant le contraste et en ne gardant que la composante rouge. Il calcule ensuite le gradient de l’image en appliquant les masques de Sobel X et Y puis améliore les contours en passant d’une image en niveaux de gris vers une image en noir et blanc. Cette étape est complétée par une réduction du bruit et une érosion-dillatation pour enlever les zones sans intérêt. Il reste enfin à sélectionner la bonne région de l’image en prenant en compte la position, la taille et la forme de l’image. Une fois la bonne région sélectionnée, le comptage des pixels nous donne accès à la surface de la langue en mm².
Image d’origine
Image en noir et blanc avec seuillage
Sélection de la région dintérêt
Extraction de la surface
Afin de récolter un échantillon de photos servant à déterminer les conditions optimales de prise de vue ainsi que tester l’algorithme, un premier prototype a été réalisé en PMMA découpé au laser. Pour pouvoir déclencher la prise de vue sans avoir à brancher un écran sur le Raspberry ni avoir besoin d’une souris ou d’un clavier, un bouton poussoir a été ajouté sur le côté du prototype.
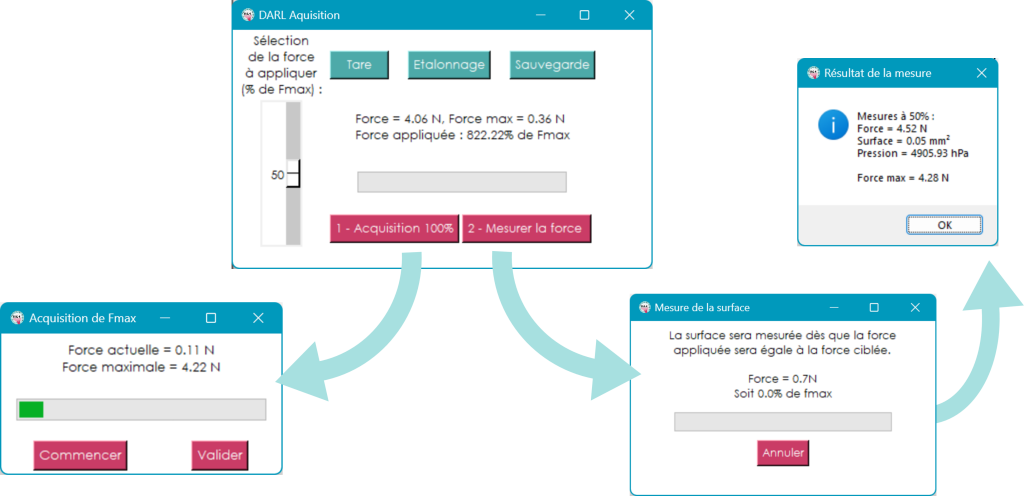
Interface graphique :
L’interface a été réalisée en Python, utilisant la librairie Tkinter. Elle a été codée en utilisant quatre classes – une par fenêtre de l’interface – héritant de la classe Tkinter. Elle est constituée d’une fenêtre principale depuis laquelle on peut sélectionner la force demandée au patient, effectuer l’acquisition de la force maximale et enfin effectuer la mesure finale de la surface lorsque la force demandée est atteinte.